TOMIX TCS電動ターンテーブルⅡの制御マイコンのプログラムを弄って、回転速度に変化を付けてみました。
これをオークションで仕入れた時期は、ちょうどKATO製のターンテーブルが発売されたときでした。見た目はKATO製の圧勝でしたが、車庫を含めたトータルの大きさが大きかったり配線の自由度が低いような気がして、TOMIX製を選びました。 しかし、見た目のほかに「駆動音が騒がしい」,「回転速度が定速」なのはTOMIX製の大きな欠点で、今回はKATO製のように回転速度だけでも変化をつけてみようと、制御マイコンのプログラムを弄ってみました。

コントローラ裏の写真です。四隅の黒いゴム板をはがすとネジが隠れています。ゴム板は両面テープで貼り付けているだけなので、あとで貼り直します。

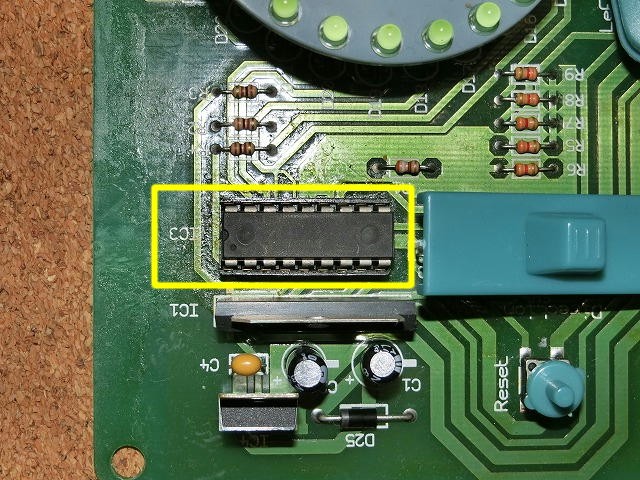
コントローラーを分解すると、1枚目の写真のようにカバー、底板、基板に分かれます。2枚目の写真が基板上の制御マイコンのアップです。マイクロチップ社のPIC16F628Aが使われています。今回はこれを何とかします。 クセのある図で申し訳ないですが「回路図(PDF)」と「タイミング図(PDF)」です。(←文字をクリックしてください。) このコントローラーには2モーター(回転用と位置ロックピン用)を1チップで制御できる変わったモータドライバが使用されており、回路はシンプルにできてます。一方、タイミング図を見ると回転動作から停止するときに、若干ですがPWM制御で回転速度を落としていることがわかりますが、目をこらして回転の様子を見ていてもわかりません。回転の仕方を実感的にするためというよりは、急制動で何かしらの悪影響がでないようにするための制御のようです。とりあえず、このPWM制御を拡張することで、動き出しと止まる前はゆっくりと動くようにして、回転を実感的に見せようと思います。
プログラム開発の途中の様子です。冒頭で制御マイコンのプログラムを弄ると書きましたが、一から開発しています。開発はMPLAB-X IDE上でフリーのXC8を利用し、PICkit3を使って10日ほど掛けて行いました。また、オリジナルの制御マイコンのPIC16F628Aはそのまま保管し、たまたま以前から確保していたPIC16F648Aを使っています。 プログラムの大枠としては、転車台の位置が始点または終点から15度以内で36%、30度以内で60%、これ以上の角度で100%の速度(デューティー比)にして回転させることにしました。最初はキャリア周波数を20kHzにして試行錯誤を繰り返していたのですが、回転速度が50%を下回ると突っかかったように止まってしまうことが多くなり、キャリア周波数を1.25kHzに下げて回転速度を36%まで下げることにしました。できればもう少し回転速度を下げたかったのですが、これ以上下げるとキャリア周波数をどう調整しても回転の途中で頻繁に止まってしまい、断念しました。ギヤ音がうるさすぎるのか、キャリア周波数を可聴域までに下げたことによるモーターの唸り音は聞こえません。





回転の様子を動画にしてみました。正直なところ動画ではわかりづらいのですが、買ってきたままの状態よりはマシになっていると思いたいです。(^^; ついでに電源を切っても現在位置を記憶し続ける機能と、コントローラーのLEDの位置がターンテーブルの位置とずれているときに、手動で合わせる機能を付加しています。 一番の問題である回転時の騒がしい駆動音だけはどうしようもなかったですが・・・。(T_T)